
|
Pumpkin Space -- offering a wide range of technologies and buses for small satellite customers -- is pleased to announce the successful launch, deployment and early-stage commissioning of two more SUPERNOVA buses. The U.S. Navy's Naval Information Warfare Command Pacific's (NIWC Pacific) LACE-1 and LACE-2 are 6U-size SUPERNOVA laser communications platforms that use Pumpkin avionics with flight software originally developed at the U.S Naval Research Lab (NRL). LACE-1 and LACE-2 launched from Vandenberg Space Force Base on March 4 and are operated by NIWC Pacific. "Pumpkin is delighted to see these two SUPERNOVA buses on-orbit and functioning well," said Dr. Andrew E. Kalman, Pumpkin's president & CTO. "An original cooperation between NIWC Pacific (then known as SPAWAR), NRL, the Air Force Institute of Technology (AFIT) and Pumpkin yielded the first SUPERNOVA buses in the 6U format. SUPERNOVA has evolved as a standardized and open bus for U.S. government customers. These buses were some of the first to utilize Pumpkin's 64W "propeller" solar array, BeagleBone-based linux OBC and BM2 intelligent Li-Ion battery." 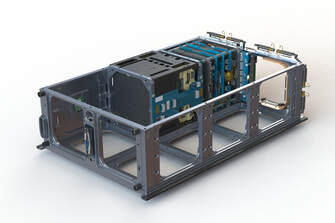 6U SUPERNOVA bus with 4U of payload volume Founded in 1994 and providing hardware, software and services for the smallsat community since 2000, Pumpkin provides market-leading solutions for smallsat solar arrays, power systems, batteries, OBCs, communications solutions, software, testing services and complete SUPERNOVA buses. For more information please contact <[email protected]> or see https://www.pumpkinspace.com.
Pumpkin is at the CubeSat Developer's Workshop in San Luis Obispo Tuesday through Thursday of this week. Come by our booth and see what we've been up to! Also, please check out our recent white paper on rover power systems.
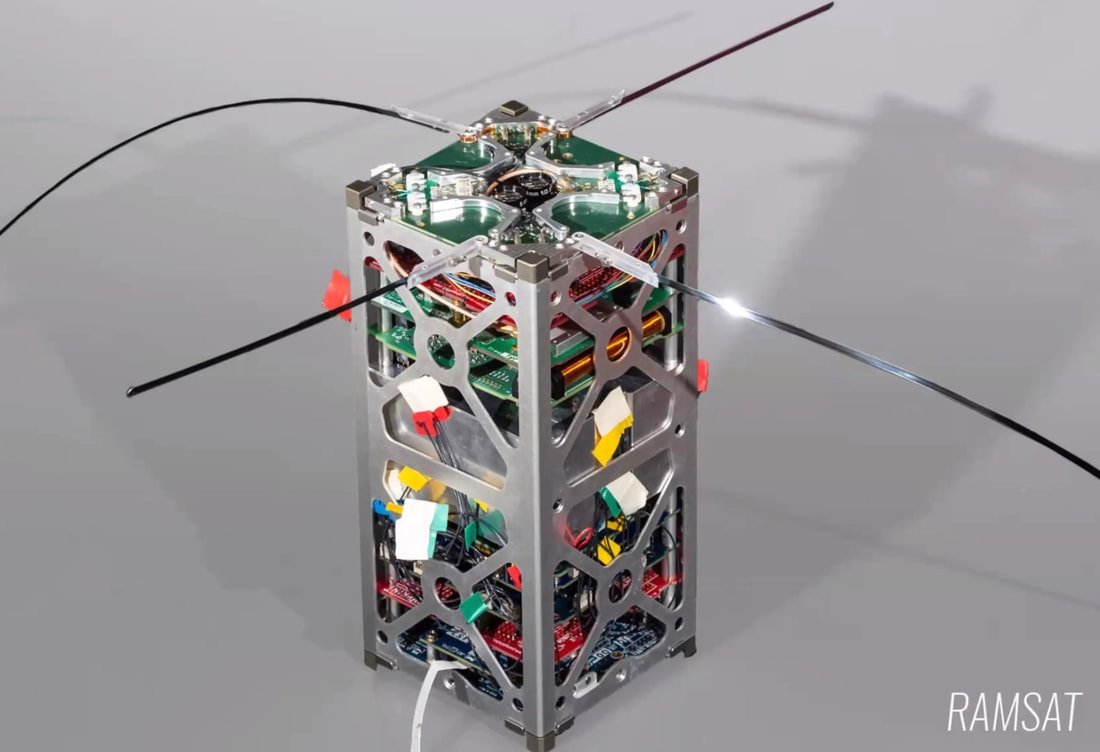
A group of middle school students in Oak Ridge, Tennessee (USA) built a 2U CubeSat with help from faculty and mentors, and launched it in June of 2021. Deployed from the ISS, RamSat remained in LEO orbit until October 2022, when its final transmission was received over South Africa, prior to deorbiting.
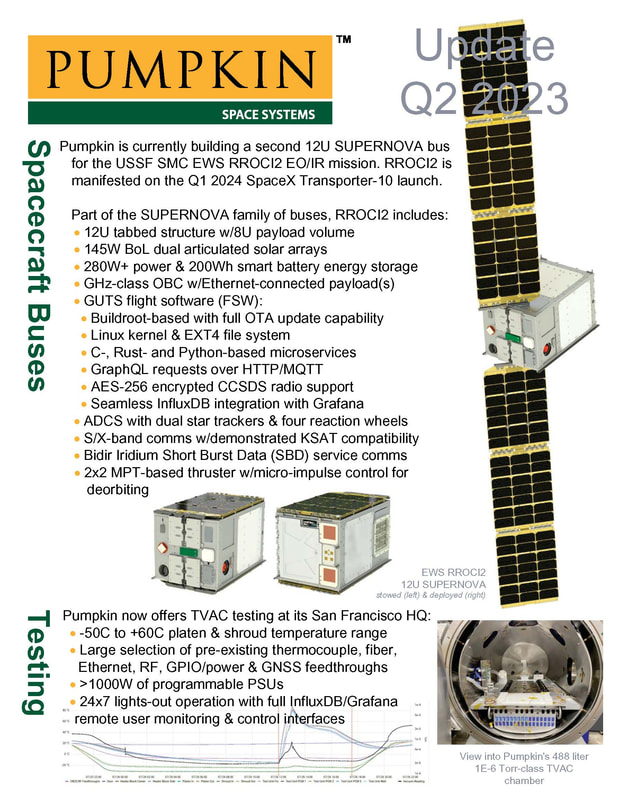
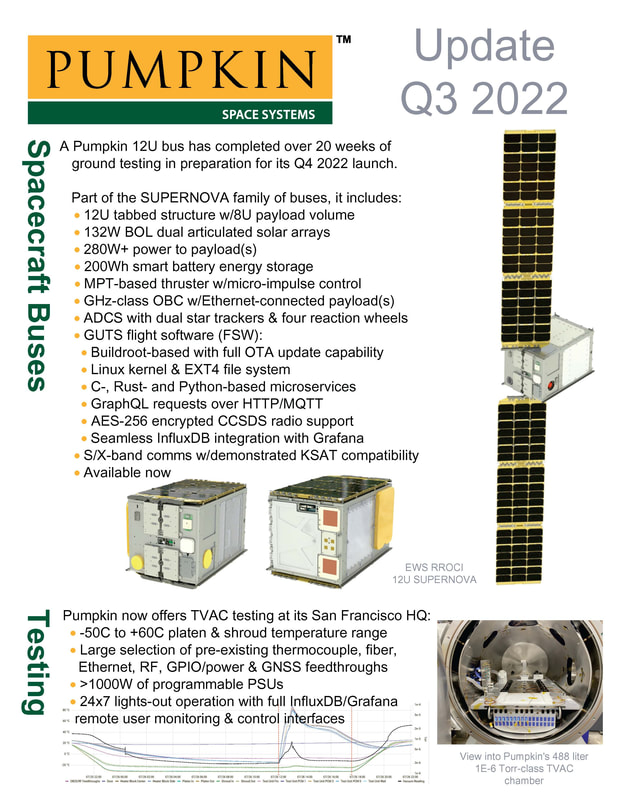
A Pumpkin 12U SUPERNOVA bus -- the bus portion of the U.S. Space Force's EWS Rapid Revisit Optical Cloud Imager (RROCI) mission awarded to Orion Space Systems (OSS) in Colorado -- has completed its environmental test campaign with the payload fully integrated. 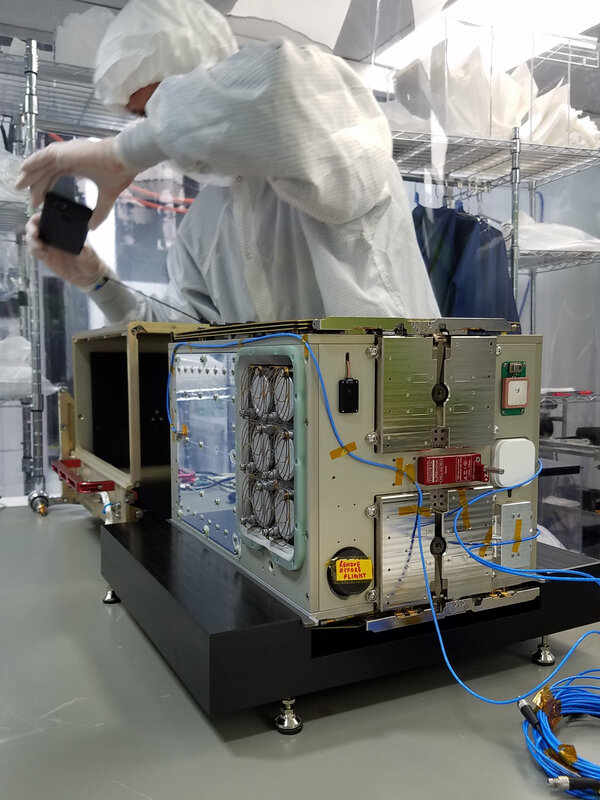 +Z end of EWS/RROCI post-vibe in OSS's clean room. Image courtesy of Adam Reif. The EWS/RROCI 12U SUPERNOVA bus incorporates several unique Pumpkin subsystems, including the articulated 132W DASA array, the EPSM 1 multi-channel power system and two BM 2 intelligent batteries. "At each and every point in the environmental test campaign of this Pumpkin 12U SUPERNOVA bus, TVAC and/or vibe testing identified zero issues surrounding Pumpkin components and subsystems," said Dr. Andrew Kalman, Pumpkin's President & CTO. "We're very pleased to support the Space Force's mission with this highly capable Pumpkin bus."
COVID-19 shut down the SmallSat Conference in 2020 and 2021. In 2022, Pumpkin is back in Logan, Utah. Please come by the booth to discuss your satellite-related needs!
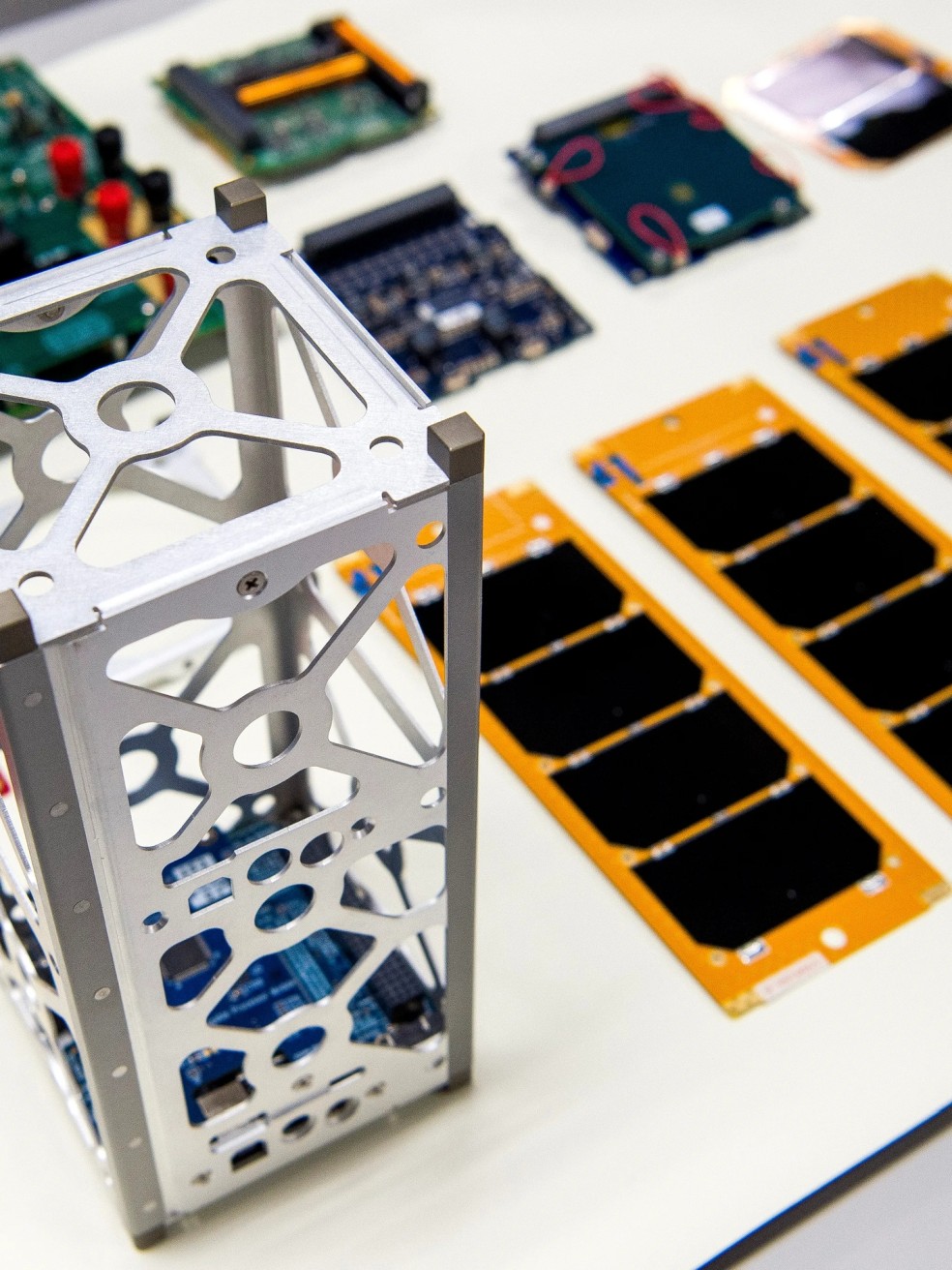
Pumpkin offers both commercial off-the-shelf (COTS) and custom solar panels for space missions. Pumpkin just completed a set of four panels for a 2U CubeSat, with three COTS panels and one custom panel. 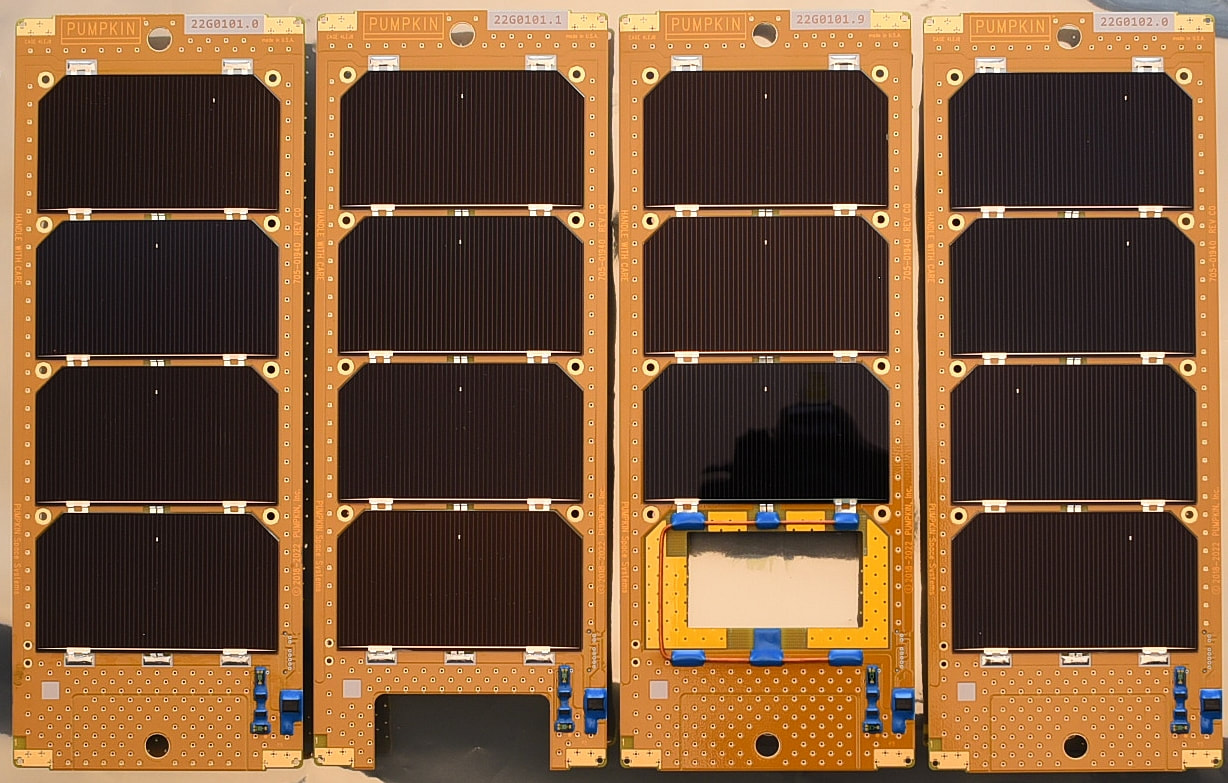 This panel set consists of two COTS 4-cell side panels for a 2U CubeSat, one COTS 4-cell front panel for a 2U CubeSat, and one custom side panel derived from a COTS 2U-size panel, but with a customer-specific cutout. All four panels also include temperature sensors and Sun sensors.
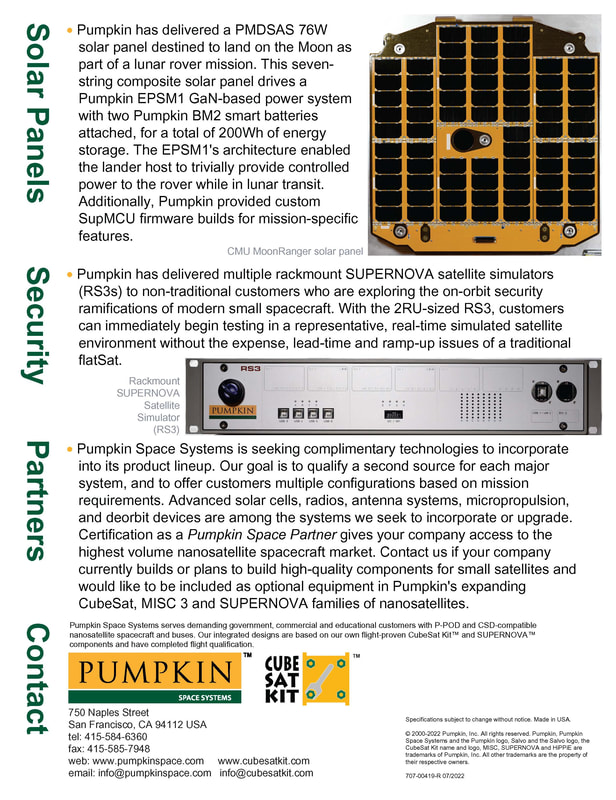
Pumpkin has delivered thousands of Watts of space-grade solar panels, with a 100% on-orbit success rate. Please contact Pumpkin with your solar panel needs. The first external user of Pumpkin's TVAC chamber completed a week of testing this week. 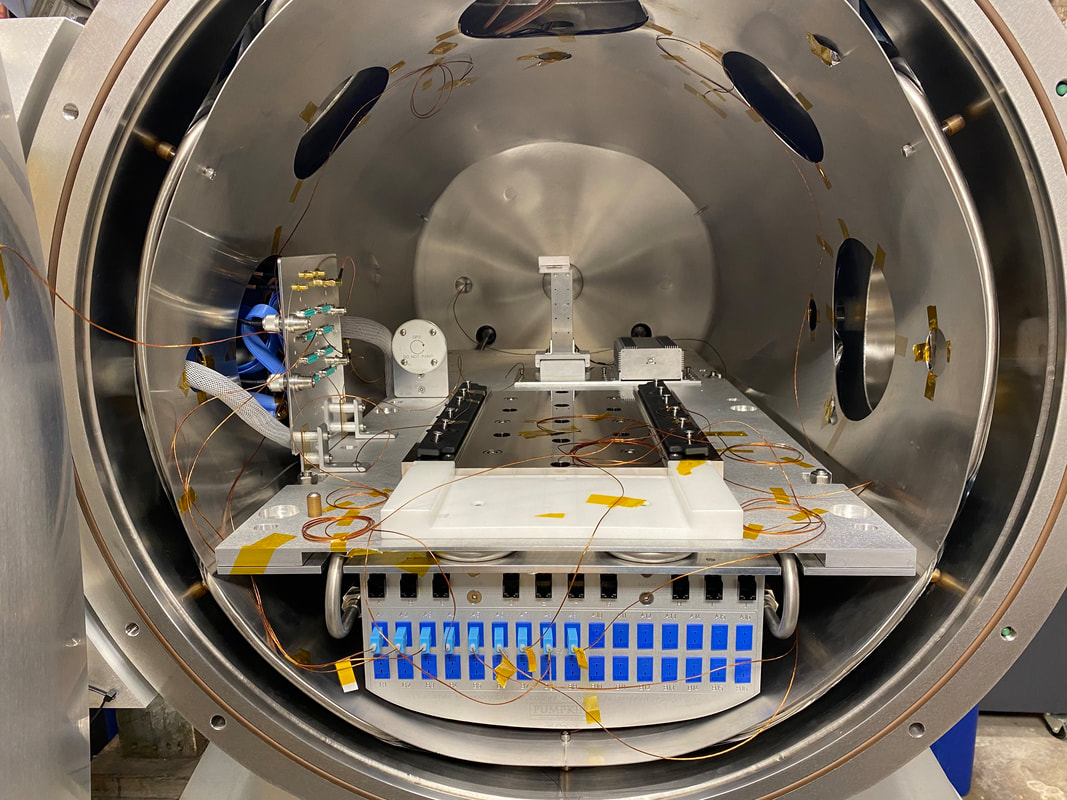 View into Pumpkin's TVAC chamber. Pumpkin's TVAC chamber is designed to be a lights-out, 24x7 test facility with remote access to maximize in-chamber test plans even in the wee hours of the morning. It's equipped with a wide range of pre-existing thermocouple, fiber, Ethernet, RF, GPIO/power and GNSS feedthroughs, and has over 1000W of programmable PSUs at its disposal. Data is fully logged in real time to an InfluxDB database with concurrent Grafana visualizations provided. 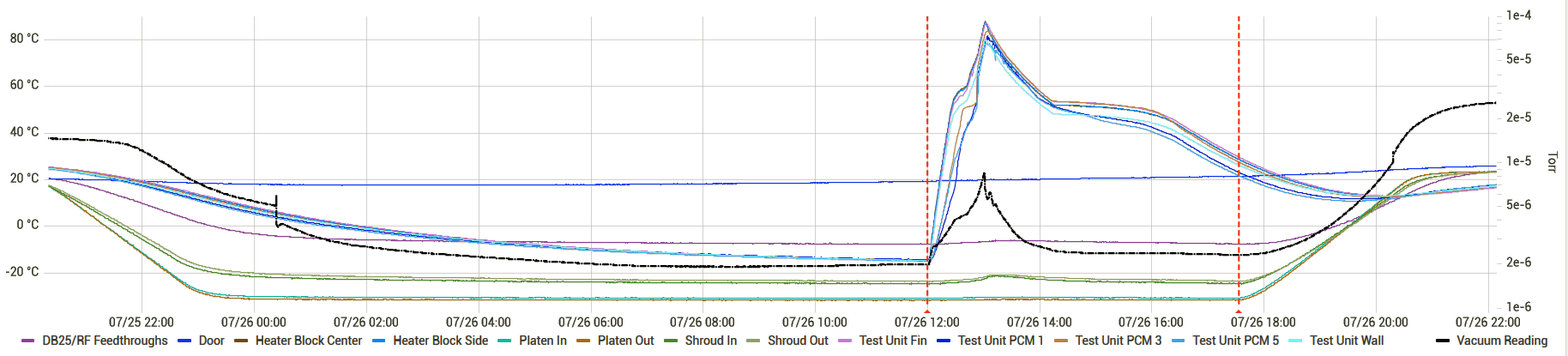 Pumpkin recently delivered a 72W solar panel that is destined for the Moon. Configured as a single 6x10S1P + 1x12S1P solar array on a carbon fiber and aluminum honeycomb substrate, this panel will drive a Pumpkin power system consisting of a Pumpkin EPSM1 multi-channel high-efficiency power system with two Pumpkin BM2 100Wh batteries attached, all in a lunar rover. 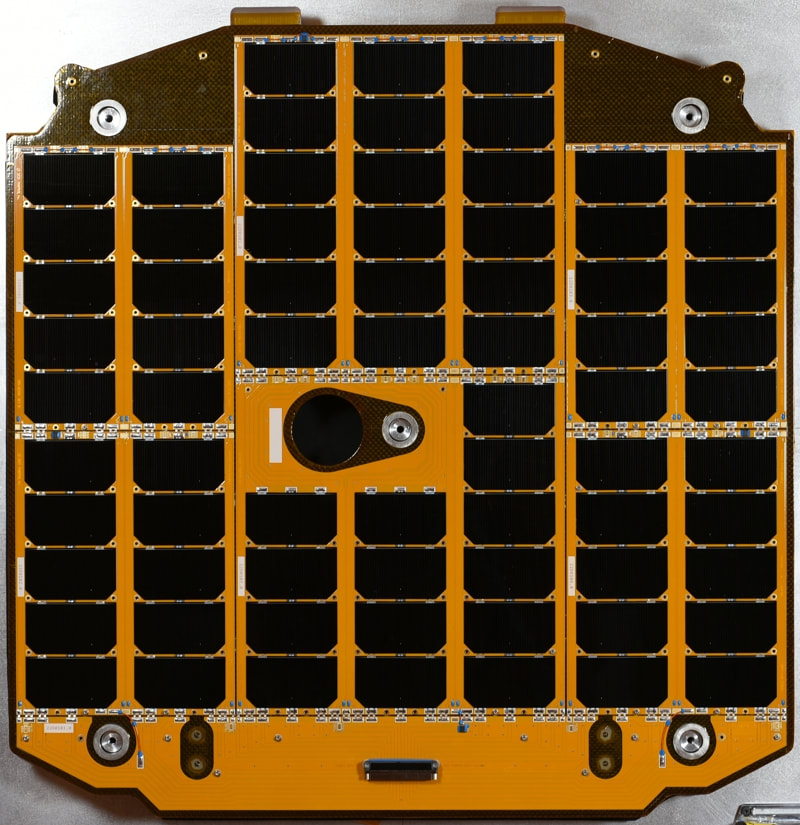 This solar panel has the usual hallmarks of a Pumpkin PMDSAS solar array, including redundant paths for every solar cell string's signal net, redundant bleed resistors, multiple temperature sensors, an extremely high degree of design symmetry to reduce cost, and many design details customized for this particular application. The signal traces are implemented exclusively on the top layer of the PMDSAS sub-panels via careful maze routing, for the ultimate in reliability.
Pumpkin is delivering deliver a Pumpkin SUPERNOVA bus stack to a customer, in the form of a stack of modules that fits inside a 3U CubeSat. Additionally, the customer has the same stack inside a Rackmount SUPERNOVA Satellite Simulator (RS3).  Both stacks run the same Pumpkin flight software, simulate a variety of Pumpkin flight modules, include a real GPSRM1 GNSS receiver module, and provide SUPERNOVA-class payload connectivity via serial and Ethernet connections. The consistency of the SUPERNOVA architecture and the friendliness of its open flight software architecture promote rapid spacecraft development and payload integration.
A recent Wired article includes a nice image of NovaWurks' SIMPL HiSat satellite on orbit. On it you can see two of the many Pumpkin solar panels that HiSat uses. The fixed panels power the individual HiSat cells as the system is aggregated; once the HiSat's on-orbit configuration is complete, it deploys the two DCSAs for hundreds of Watts of power. An overview of the SIMPL mission shows the DCSAs in their deployed configuration, and is available here. 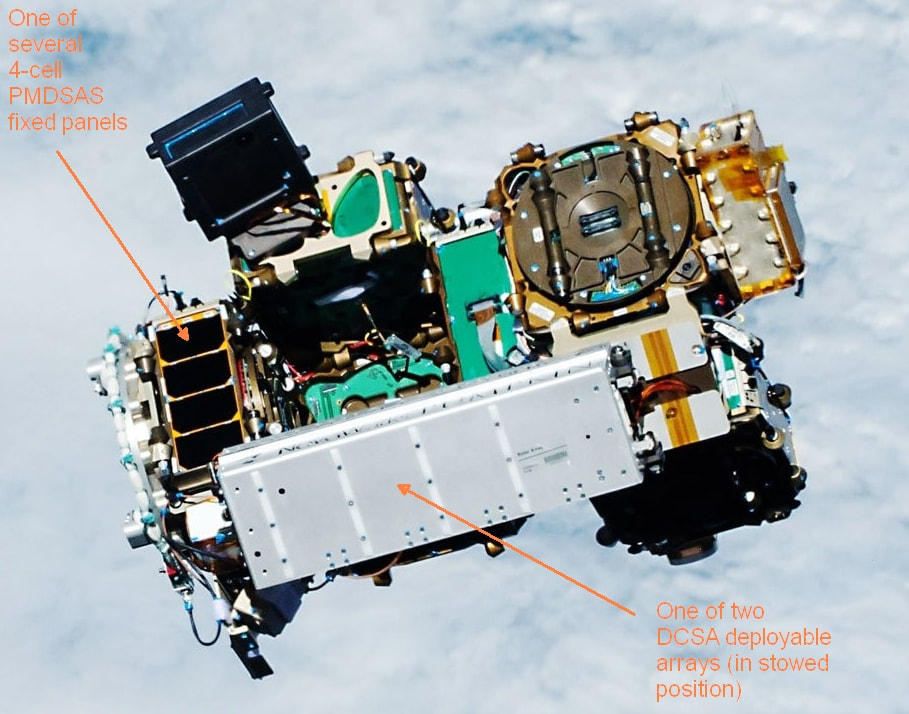 NovaWurks SIMPL HiSat on orbit. Image courtesy of NovaWurks Additionally, the object at the upper left that is mounted at a slight angle is SNAPS, the Stanford Nano PictureSat, a student project at Stanford University's Space & Systems Development Lab (SSDL) from 2012 to 2016. Stanford students David Gerson, Andrew Ow, Rishi Bedi and Thomas Teisberg were instrumental in reconfiguring SNAPS for testing and integration at NovaWurks.
|
Archives
March 2024
Categories |

 RSS Feed
RSS Feed
Home |
About Us |
Store |
Salvo RTOS |
Contact
|
Copyright © 2015-2022